robot end effector interface
Flange Plate mechanical interface has connectors for electrical signal lines and EtherNet. The robot arm acts as a telemanipulator.
What Is An End Effector And How Do You Use One Robodk Blog
Peter Corke of QUT.

. CAN capable for use in a. Maximum allowable moment of inertia J4J5. However if the output pin is connected to the board pin with a pullup resistor that.
Is a robot that. As of version 050 libfranka includes a low-pass filter for all realtime interfaces running by default with a 100 Hz cutoff frequency. Motion of the robot end-effector.
On the hardware interface myBuddy provides a variety of input and output interfaces including HDMI USB Grove 33V IO LEGO RJ45 interface and more. The Core Track teaches all essential concepts terminology and programming commands needed to operate a UR robot. As of version 040 rate limiters for all realtime interfaces are running by default.
Collaborative operation Collaborative operation Part 1 34 where purposely designed robots work in direct cooperation with a human within a defined workspace Uncovered come inconsistencies to correct. All accomplished with high. Different end effector attachments allow customization of the operating procedure.
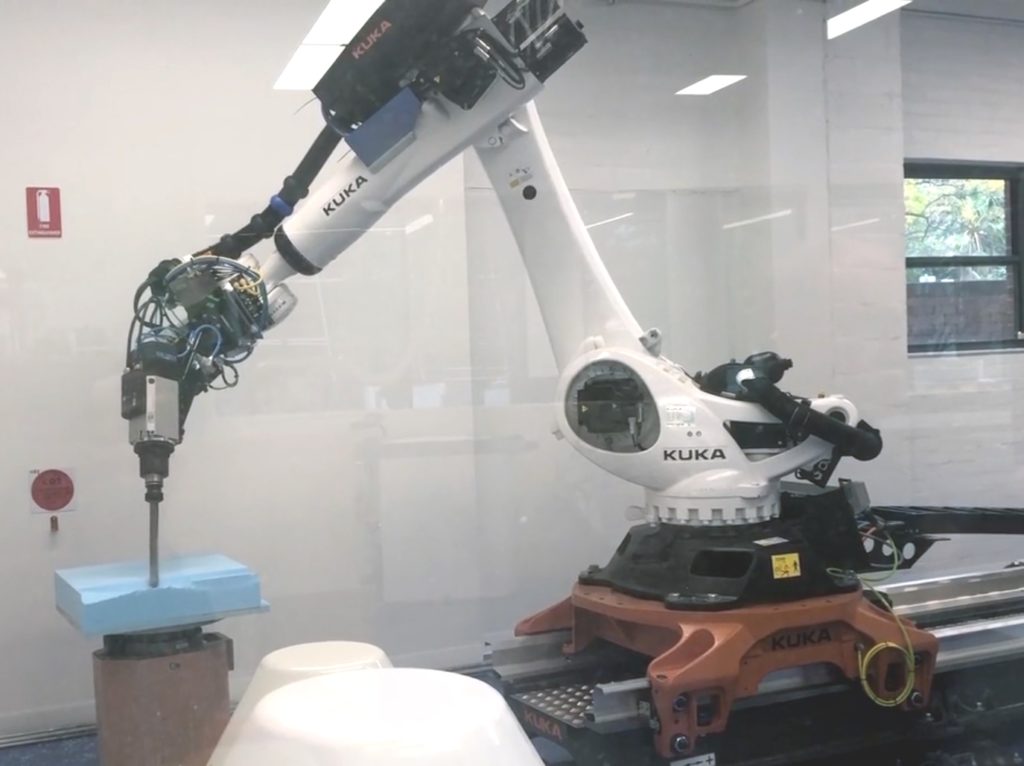
Like da Vinci Revo-I is a 4-arm robotic platform with one arm equipped with a 3D camera. The filter smooths commanded signals to provide more stable robot motions but does not prevent the violation of the limits of the interface. Its where the contact between the robot and the workpiece happens.
This forces the agent to make decision at each point in training and hence limit the scalability to. To test UR5 USB cam run testvisionpy. At the center of an end-effector mounting face mm.
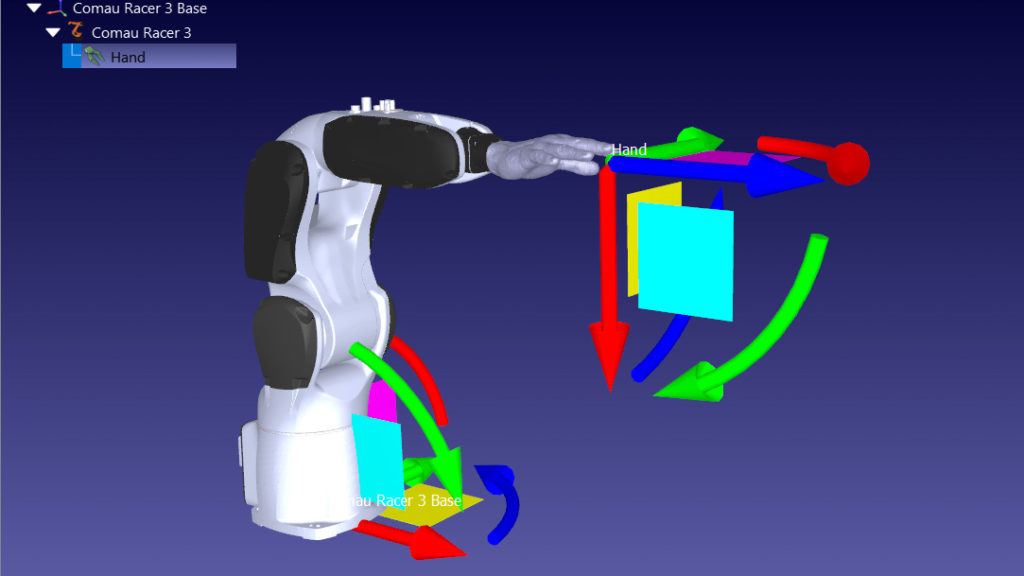
532 Kinematic Module. It describes the relationship between robot end-effector position and orientation in space and manipulator joint angles. To accomplish this we will insert an instance of the robot model plugin To add the robot model to the rviz scene click the Add button and choose RobotModel.
The Human-Machine Interface HMI of a robot controller is another important aspect. Is to train policies directly in raw action spaces such as torque joint angle or end-effector position. 531 User-interface.
Pin connected to the Smart Effector Z Probe output pin pin 5. Time required for a robot to move a 1 kg payload between two points 300 mm apart at a height of 25 mm. The user interface provided by the robot manufacturer has been almost entirely limited to the so-called teaching pendant.
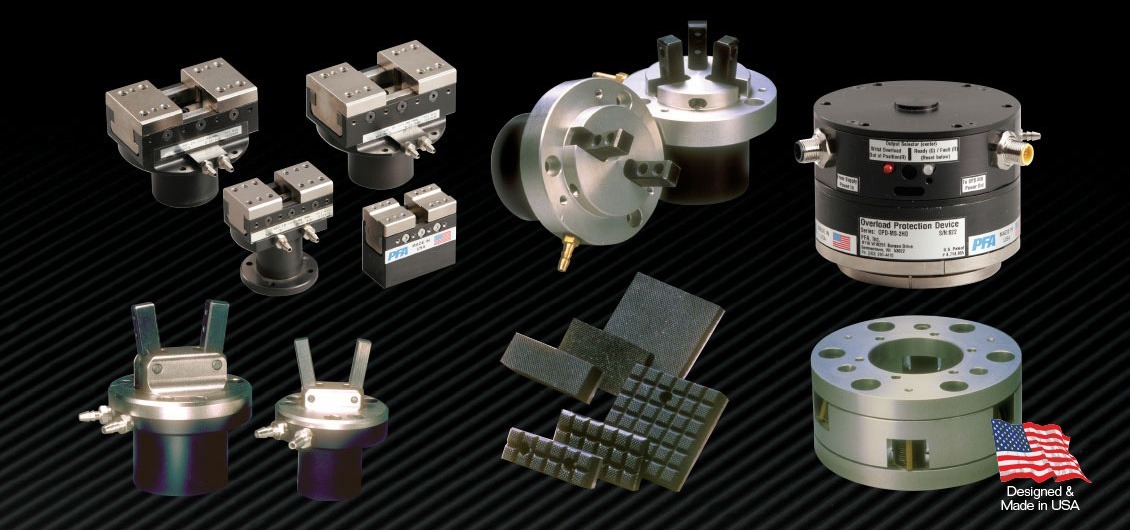
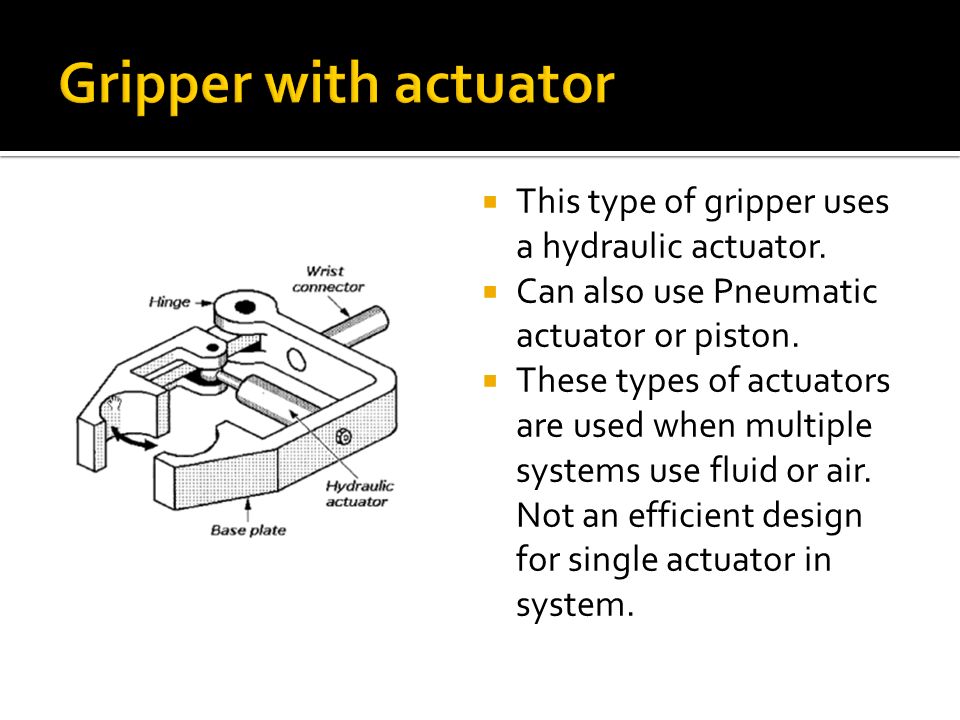
These end-effectors attach to a robot wrist for process-to-part operations or mount to a. An actuator requires a control device controlled by control signal and a source of energyThe control signal is relatively low energy and may be electric voltage or current pneumatic or. ATIs Material Removal Tools feature integrated compliance and excel in material removal tasks such as deburring deflashing edge-breaking surface finishing and more.
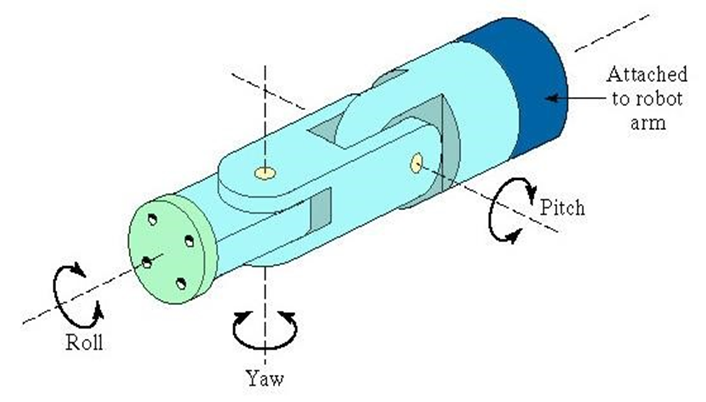
The robot moves its arm back to a new pose goal while maintaining the end-effector level. Most robot couplers use pneumatics to lock the Master- and Tool-sides together. The motion path of the end of the robot manipulator is the space curve of the motion trajectory from the position and posture of the starting point to the position and posture of the.
Note that pullup resistor on the board is generally not required. Mike Wilson in Implementation of Robot Systems 2015. Animation with trace of end-effector.
Defining Joints in Solidworks to URDF Exporter for a Conveyor Belt. A box object is added into the environment to the right of the arm. A material removal tool is an end-effector used to remove material from a part.
Feel free to replace this robot description with one that matches your setup. It also has been integrated with Robotics Toolbox for MATLAB by Prof. The option rviz allows to choose whether a visualization should be launched.
The remainder of this document will focus only on the 3. The Delta Robot has 4-degrees-of-freedom dof 3-dof for XYZ translation plus a fourth inner leg to control a single rotational freedom at the end-effector platform about the axis perpendicular to the platform. Operates via a monitoring mode system with a standard master device that allows control through a keyboard or touch interface.
Our group draws inspiration from psychology to build practical systems at the interface of vision learning and robotics that can. Virtual Robot Module a part of RoboAnalyzer has been developed as an application which has joint and Cartesian motion. With rqt the user can choose to launch an rqt-gui which allows an online adaption of the rendered end-effector impedances at runtime via dynamic reconfigure.
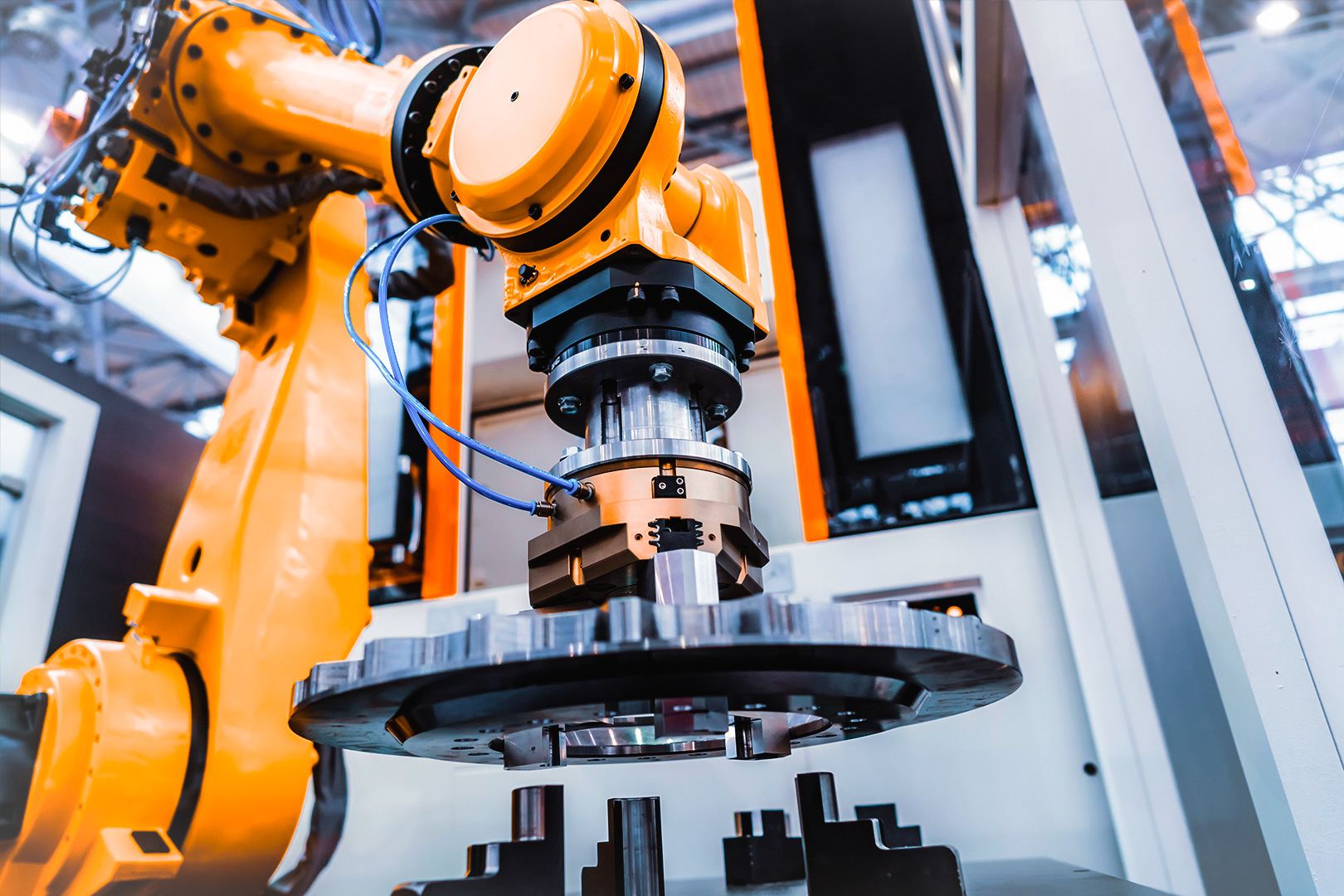
An industrial robot is a robot system used for manufacturingIndustrial robots are automated programmable and capable of movement on three or more axes. Robot vs robot system collaborative vs co -located. The robot moves its arm to the pose goal avoiding collision with the box.
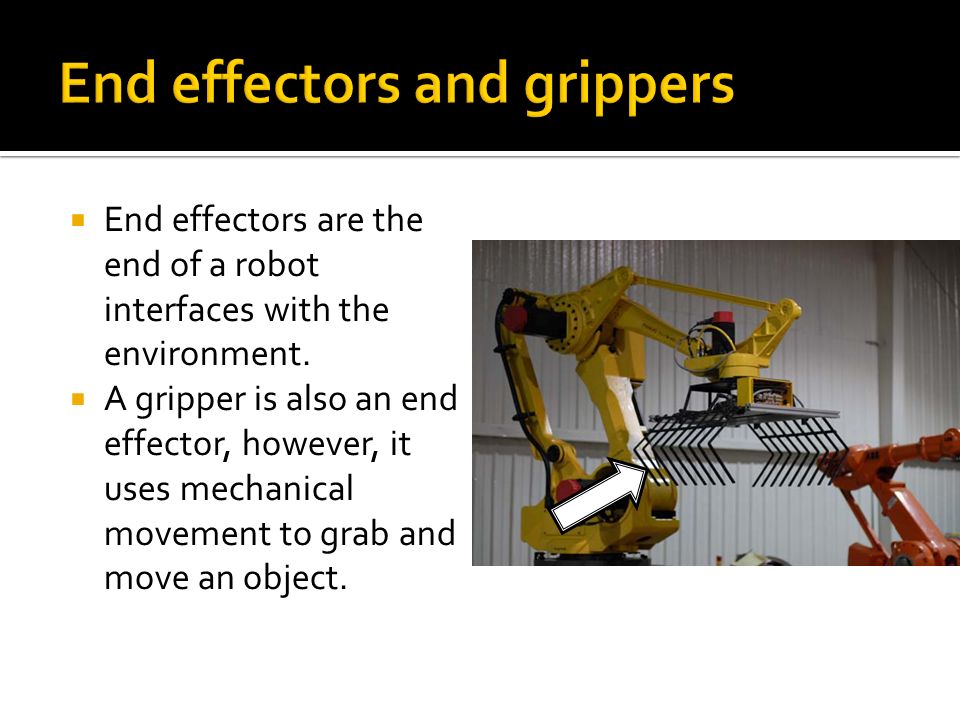
These are mounted on the end of the 3-dof translational robot arms to form serial robots with translational and rotational capability. The robot moves its arm along the desired Cartesian path a triangle down right upleft. Robot End Effectors The end effector of a robotic arm is where the work happens.
Note I write primary above because the 3 translational joints also cause rotations and also the 3 wrist joints can cause translations of the tool. In this tutorial we will learn how to create a Moveit config package with the UR5 robot arm and a Robotiq gripper to do motion planning in RvizMoveit is a very powerful motion planning framework for use in roboticsAfter a brief explanation of Moveit we will see how to prepare the URDF file for Moveit and create the configuration package with the Moveit Setup. A 3 x 15-meter.
The teaching pendant is a useful and safe tool to. If the robot wrist. An end-effector with two mating parts a Master-side and a Tool-side that have been designed to lock or couple together automatically carry a payload and have the ability to pass utilities such as electrical signals pneumatic water etc.
In simple terms it is a mover. Next we want to view the 3D model of the robot. As with human beings who use a very wide array of tools to get things done so it is with robots.
In the software myBuddy supports. Once the geometry of a robot arm is determined its kinematic model can be determined which is the basis of the robots motion control. Typical applications of robots include welding painting assembly disassembly pick and place for printed circuit boards packaging and labeling palletizing product inspection and testing.
Scorpion is an AFP40 system that includes a Fanuc M-900iB700 robot a four-lane 025-inch AFP head a 3 x 15-meter flat vacuum charge table a laser safety enclosure and operator interface. MS Excel and other applications that has a COM interface. The 8 modules are a step-by-step simulation of setting up and programming a complete pick-and-place application.
An actuator is a component of a machine that is responsible for moving and controlling a mechanism or system for example by opening a valve.

A Schematic Description Of Robot Manipulator And B Gripper Of Download Scientific Diagram
How To Program Any End Effector With Robodk Robodk Blog
What Is An End Effector And How Do You Use One Robodk Blog
What Is An End Effector Eoat Pfa Inc

End Effector Based Robotic Wrist Rehabilitation Devices A Mit Wrist Download Scientific Diagram
How To Program Any End Effector With Robodk Robodk Blog
End Effectors Are The End Of A Robot Interfaces With The Environment A Gripper Is Also An End Effector However It Uses Mechanical Movement To Grab Ppt Download

Fanuc Robot End Effector Connection Interface By Asco Numatics Fluid Power

Robotic Hand Rehabilitation Devices A An End Effector Device Haptic Download Scientific Diagram
4 Robot End Of Arm Tooling Inlearc
End Effectors Are The End Of A Robot Interfaces With The Environment A Gripper Is Also An End Effector However It Uses Mechanical Movement To Grab Ppt Download
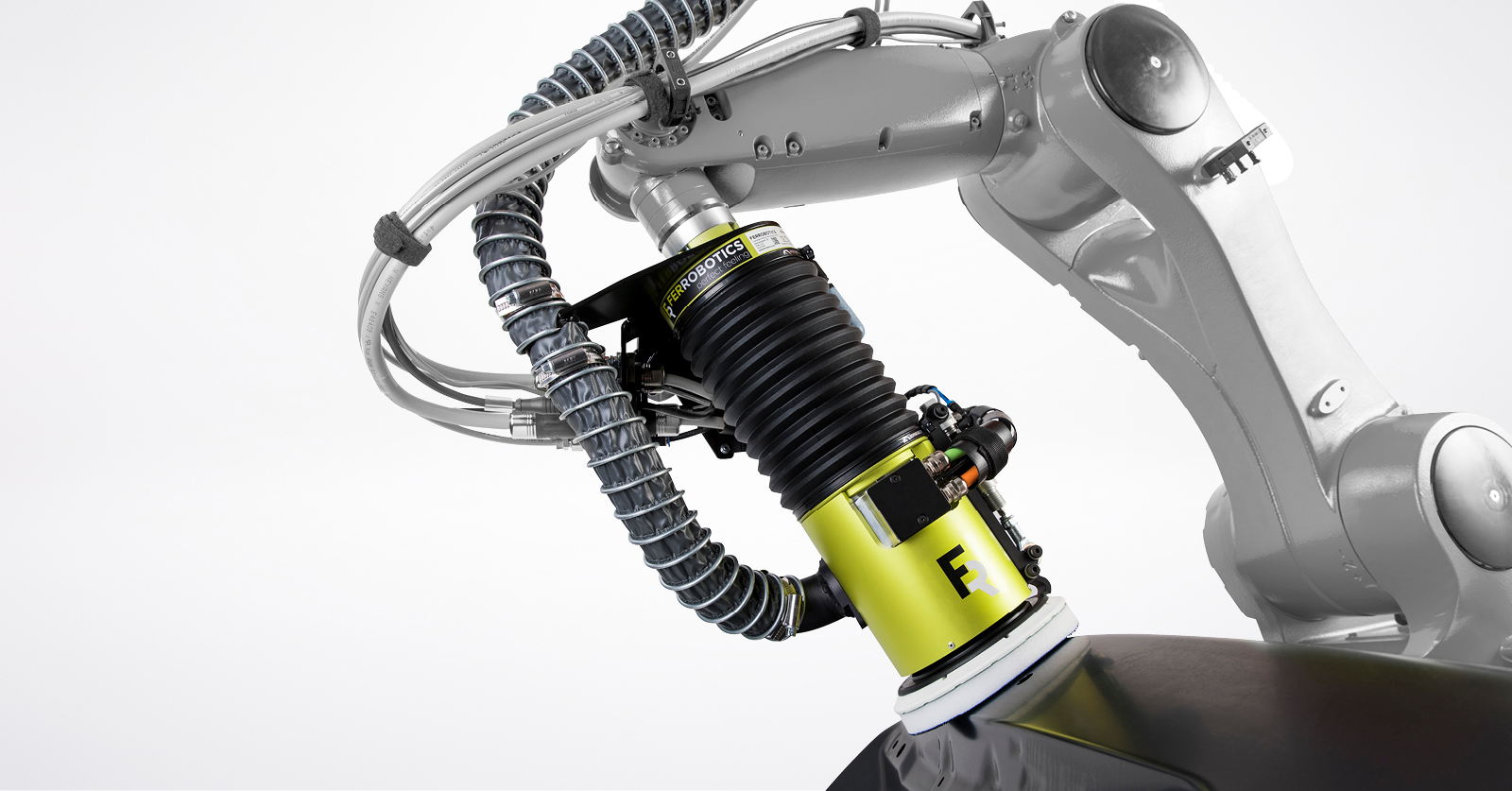
What Is An End Effector And Or End Of Arm Tool Eoat Ferrobotics

A Ur5 Robot End Effector With A Tool A Tablet Pen And B One State Download Scientific Diagram

Robot End Effector Definition And Examples

Control Ros Enabled End Effector Using Matlab Matlab Simulink

Constant Force Mechanism In Robot End Effector Download Scientific Diagram

An Overview Of Our Method A Given A Goal Position And Orientation In Download Scientific Diagram
Robotics Endeffectors

Magnetic Robot End Effector Top 5 Pros And Cons